
Parallel Reduction w/ NVidia CUDA
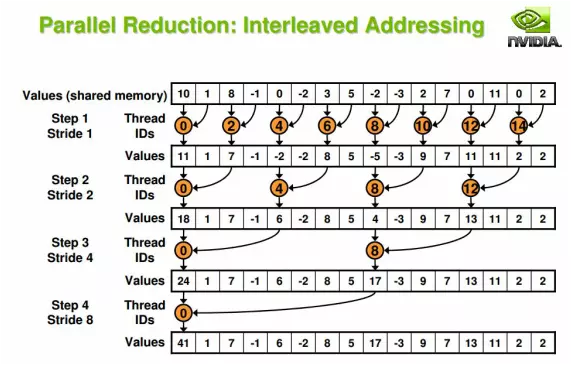
High Level Overview of the code to follow (heterogeneous programming)
- Prepare memory by copying data from the CPU memory to the GPU memory
- Run the GPU code (kernel) on the GPU until it completes
- Copy back over the results to CPU memory
Functionally Equivalent Code for CPU only Execution
// naive CPU reduction
float reductionCPU(float* A, int len) {
float result = 0.0;
for (int i = 0; i < len ; i++) {
result += A[i];
}
return result;
}
Kernel And Implementation for GPU Execution
// kernel for reduction on GPU
__global__ void reductionKernel(float* A, int len, int level) {
int thisThreadIndex = blockIdx.x*blockDim.x + threadIdx.x;
thisThreadIndex = thisThreadIndex * 2 * level;
if (thisThreadIndex < len) {
A[thisThreadIndex] = A[thisThreadIndex] + A[thisThreadIndex + level];
}
}
// Compute reduction of elements in A
// - Result placed in A[0]
// - This code only handles the cases where len is a power of 2 greater than
// or equal to 2^9
void reductionGPU(float* A, int len) {
// stick with 256 threads_per_block.
int threads_per_block = 256; // initially, each block takes care of 512 elements
// set an initial number of blocks_per_grid
int blocks_per_grid = (len / threads_per_block) + 1;
int level = 1;
while (level != len) {
// create 3-dim vector objects to initialize values
dim3 dim_blocks_per_grid(blocks_per_grid, 1);
dim3 dim_threads_per_block(threads_per_block, 1, 1);
// launch kernel on GPU
reductionKernel<<>>(A, len, level);
// wait for GPU to finish computation
cudaThreadSynchronize();
// scale up level
level = level * 2;
// Scale down the number of threads, required to prevent index overflow
// in the kernel (and the resulting bad memory accesses)
if (!(blocks_per_grid < 2)) {
blocks_per_grid = blocks_per_grid / 2;
}
else {
blocks_per_grid = 1;
}
}
}
Comments